Julian Estévez is a Professor and researcher at University of the Basque Country (UPV/EHU) in Spain. His research interests are cooperative robotics, UAVs, artificial intelligence and autonomous navigation. Moreover, he was a member of the Expert Group of the European Commission for Ethics of AI in Education, and now he takes part in the development of AI Code Practice.
Education
PhD Computer Science
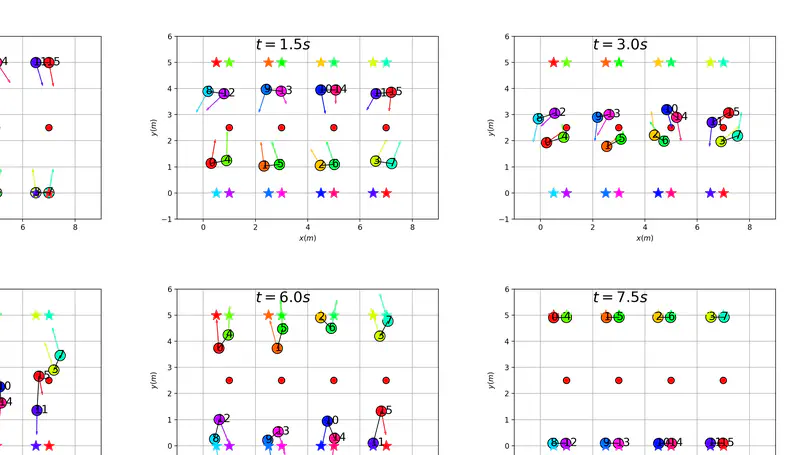
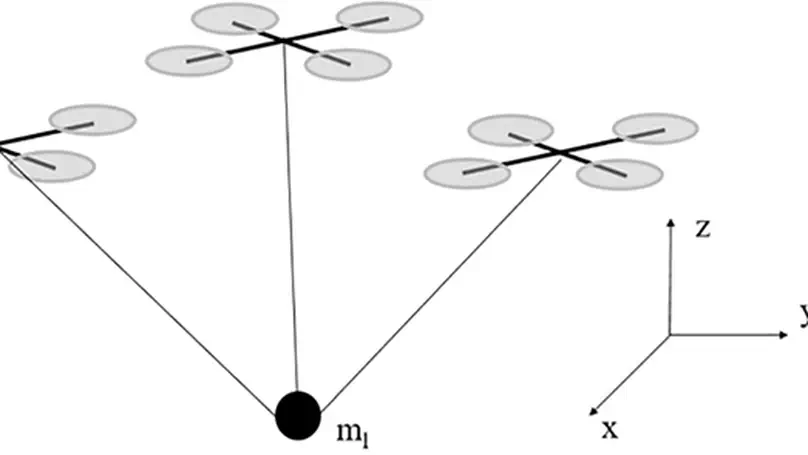
Quadrotor Team Modeling and Control for DLOs Transportation
MS Industrial Engineering
Accomplishments
Expert on Artificial Intelligence in Education and Training
Member of the European Group of Experts on Artificial Intelligence ethics in Education and Training
See certificateVisiting Professor
Visiting professor in following universities
- June 2023: Technische Universität München
- November 2019: Sapienza Università di Roma
- June 2018: International Hellenic University
- June 2017: Université Grenoble Alpes
- October 2017: Wroclaw University of Science and Technology
- June 2023: Technische Universität München
- November 2019: Sapienza Università di Roma
- June 2018: International Hellenic University
- June 2017: Université Grenoble Alpes
- October 2017: Wroclaw University of Science and Technology
Projects
*

An example of linking directly to an external project website using
external_link.Featured Publications

Recent Publications
Quickly discover relevant content by filtering publications.
(2024).
Artificial Intelligence Applied to Drone Control: A State of the Art.
Drones, 8(7), 296.
(2024).
Harnessing NOx emission management: A virtual sensor model for natural gas power generation engines with active pre-chamber.
Internet of Things, 27, 101259.
(2024).
Machine Learning First Response to COVID-19. A Systematic Literature Review.
Electronics, 13(6), 1005.
(2024).
Review of Aerial Transportation of Suspended-Cable Payloads with Quadrotors.
Drones, 8(2), 35.
(2022).
Hybrid Modeling of Deformable Linear Objects for Their Cooperative Transportation by Teams of Quadrotors.
Applied Sciences, 12(10), 5253.

Contact
Estaré encantado de escucharte.